

Subproject 1:
SMART VEHICLE ARCHITECTURE & ON DEMAND SERVICE
Big OEMs (Original Equipment Manufacturers) want to bring driverless city movers onto the market in a few years. By then, the technology must be producible in a form suitable for series production, and on the other hand, the “On Demand Services” or “Ride Hailing” must be seamlessly available as new business models. This parallelism of technological and business model development is addressed by subproject 1.
In this subproject the following topics will be addressed:
- Smart Vehicle Architecture – Conception of intelligent vehicle architecture
- Thermal Solutions – Thermal management of central computing platforms
- Interior Sensing – Machine learning for vehicle interior monitoring
- On Demand Ride Hailing Services – Public transport services on individual request
- Dynamic Route Planning for On Demand Ride Hailing Services

Smart Vehicle Architecture – Conception of intelligent vehicle architecture
The market success of automated vehicles strongly depends on the commercial and technical feasibility of these complex driving systems. The first series applications will take place in the premium segment as well as with so-called people movers, which are used around the clock by fleet operators, and will subsequently find a wide field of application in the so-called volume segment. The expected social benefits (e.g. reduction of serious accidents, better traffic flow, lower energy consumption, mobility in old age) will only become apparent through the widespread use of such applications.
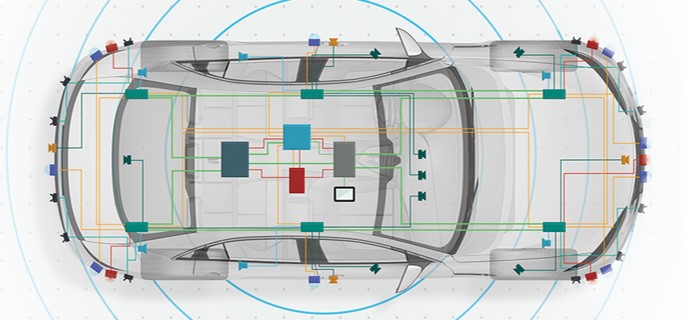
The electrical and electronic vehicle architecture (EEA) has been rather evolutionarily advanced in recent decades. Comfort and safety functions have been steadily added, the latter driven by legal requirements and the Euro-NCAP safety test observed by the buyer. As soon as a function enjoyed a certain market penetration, e.g. the parking aid, it was usually integrated into another control unit. On the one hand, this increased the complexity of the control units and, on the other hand, they reached today’s technical limits in various areas. Nevertheless, the number of control units required grew to up to 120 per vehicle, whereby the maximum is achieved due to the required installation space, the required supply of power and data as well as the air volume surrounding them for passive cooling, etc. The number of control units required for passive cooling has also increased. Starting with level 3 of automated driving, the number of sensors and actuators is steadily increasing up to the highest level 5.
Within the framework of the project, the EEA will be completely redefined in terms of functional safety, weight, installation space, costs and scalability. In close and regular coordination with various automobile manufacturers from all continents, the requirements of the different vehicle segments for future EEEs are regularly compared in order to guarantee the later series implementation with the advantages such as location security and job creation. Various possible architectures are then developed using simulation software and their behaviour is investigated.
Previous car on-board systems do not take fail-safety and redundancy into account. In addition, the large number of sensors and control units must be coupled in a fail-safe and robust manner by means of a new satellite structure. The high-performance computing platforms for AI algorithms of automated driving also require new architectural concepts that take thermal cooling into account.
Thermal Solutions – Thermal Management of Central Computing Platforms
Aptiv is one of the main providers of complex computing platforms, which are the main components for automated driving. A challenge for such computing platforms is the management of the heat generated by the power dissipation of the components. The use of active water cooling has proven to be very effective on today’s platforms. For use in the volume segment with its special challenges in terms of costs and size, today’s solution approaches must be considerably further developed. Within the framework of this work package, the challenges to be mastered are to be analysed and possible approaches to solutions are to be identified with the involvement of the local metalworking industry and research.
Interior Sensing – Machine Learning for Vehicle Interior Monitoring
Interior Sensing Vehicle interior monitoring refers to the recording and analysis of the state of the interior of a vehicle and in particular of the persons in a vehicle by means of sensor technology. Until now, these tasks have been performed in taxis or ride-hailing services (Uber, Lyft,…) by human drivers in addition to the driving task. The driver is responsible for the safety of the passengers, monitors the occupancy and cleanliness of the cabin, reminds them of objects left behind, can react appropriately to the passengers’ state of mind, provides information and tips on the surroundings or acts as a social contact.
In future mobility concepts with automated vehicles without human drivers, technical solutions will have to guarantee the safety and satisfaction of the customers and not only take over the driving task of the driver. The basis for concrete technical implementations is provided by machine learning procedures, which can learn and generalise the complex interrelationships on the basis of extensive example data sets. The focus in this work package will be on image-based processes and the practical implementation of basic functionalities in the form of prototypes.
On Demand Services as a New Business Model & Dynamic Route Planning
On Demand Ride Hailing Service (ODV) describes a new mobility service that provides people in a defined area with a free choice of starting point and end point without being tied to a specific line. On-demand traffic is controlled by an algorithm that is stored in the software that also controls the app. Customers can enter their travel requests in the app and are transported together via an algorithm. This algorithm also communicates with the driver’s terminal equipment so that they receive their route and the corresponding customers. A well-founded algorithmic decision regarding route planning depends on many influencing factors. These can be roughly divided into the following categories: The (strongly growing) demand for ride-hailing services, the traffic volume and the expected user behaviour (e.g. journey length, start-finish combinations, trajectories). The quality of the route planning depends decisively on a good prognosis of future travel requests.
In addition to the development and testing of the software solution including the algorithms, the acceptance of “On Demand Services” among the population will also be analysed within the framework of the project.
Subproject manager:
Stefan Voigt, Aptiv Services Deutschland GmbH